SBR Components
Reference photos and pin descriptions for the components used in the Self-Balancing Robot.
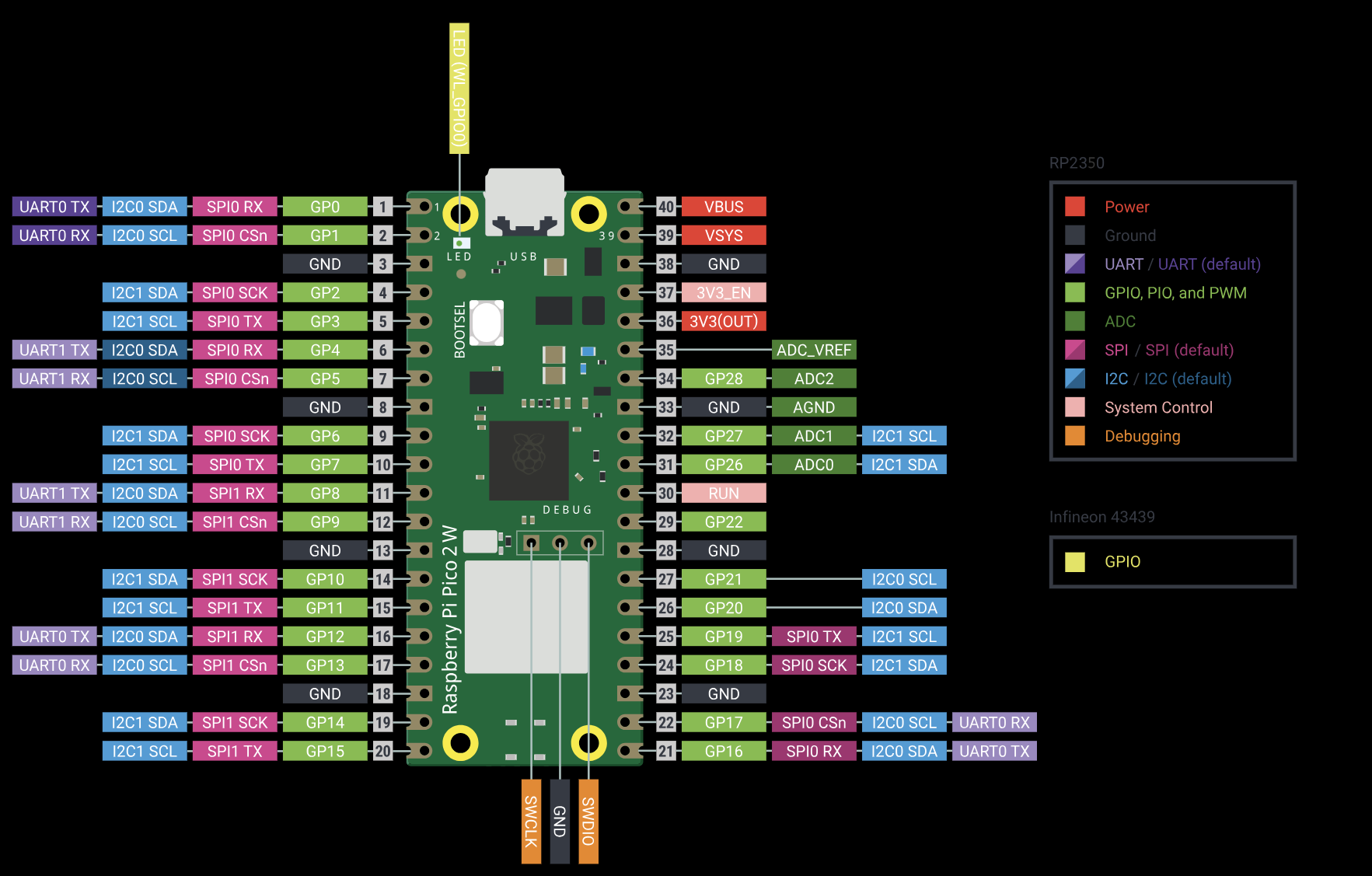
Raspberry Pi Pico 2 W
The main processor. An RP2350-based board with onboard CYW43439 for WiFi and Bluetooth. Runs the balance control loop, PIO-based quadrature decoding, and Pigweed RPC over UART.
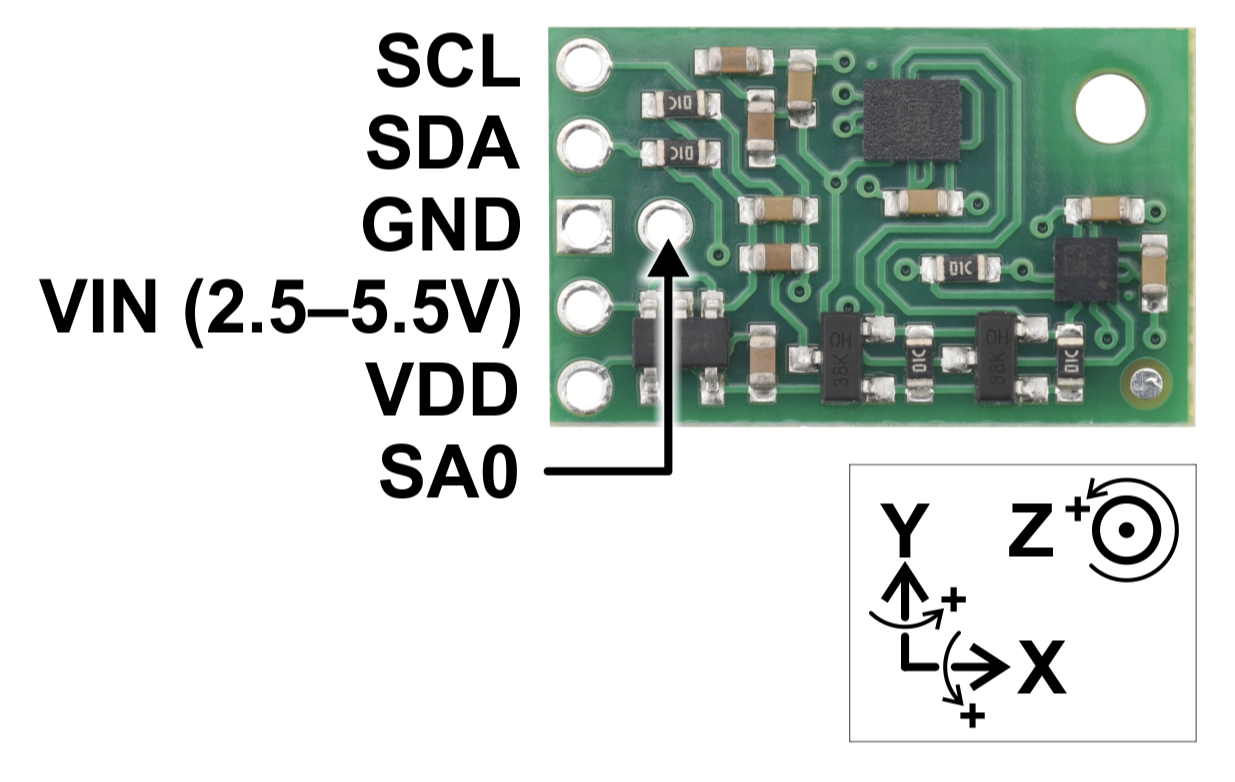
MinIMU-9 (LSM6DSO + LIS3MDL)
6-DOF IMU (accelerometer + gyroscope) plus magnetometer in a single breakout. Communicates over I2C (address configurable via SA0). Powered from the 3.3V rail. Used to measure tilt angle for the balance controller.
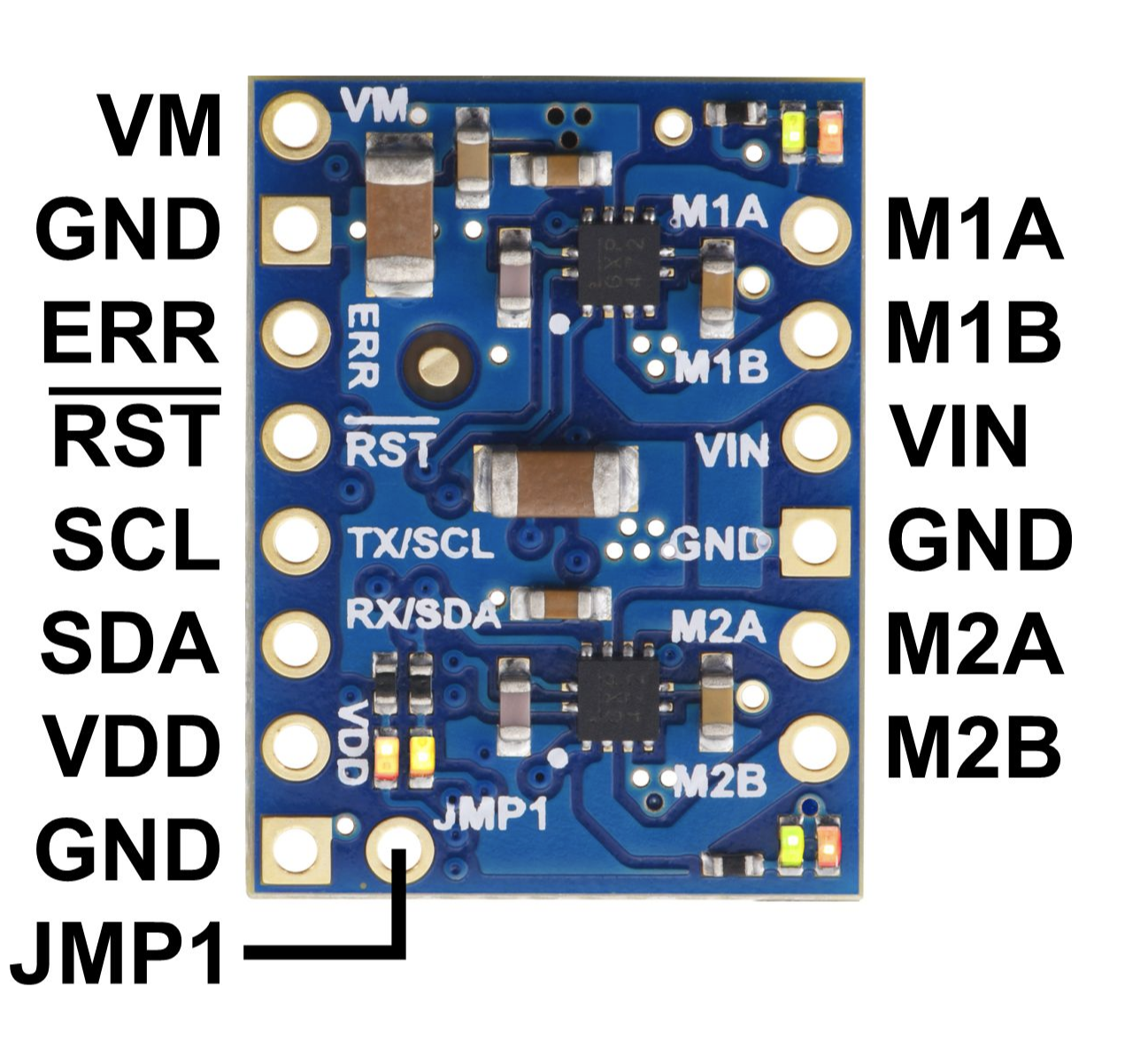
Pololu M2T550 Motoron Dual Motor Driver
Dual DC H-bridge motor driver controlled over I2C. Accepts 4.5–40V motor supply (VM), making it compatible with a 2S LiPo directly. Drives both drive motors. I2C address is configurable; default is 0x10.
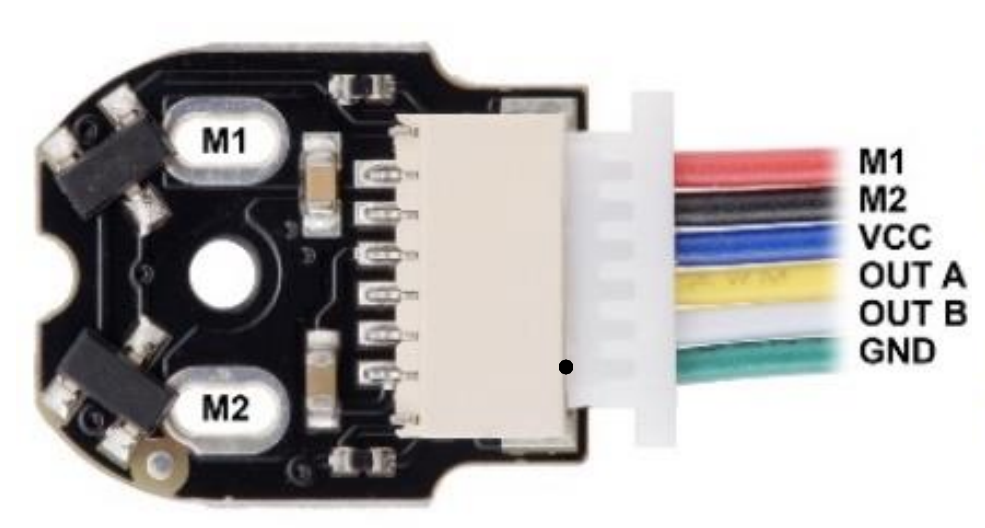
Motor Connector (Pololu 5187)
50:1 HPCB 6V DC motor with 12 CPR encoder. The connector carries two motor wires (M1, M2), encoder power (VCC), two encoder channels (OUT A, OUT B), and ground. At 4x quadrature decoding this gives 2400 counts/revolution.
Pololu D24V5F5 5V Buck Regulator
Fixed 5V, 500mA step-down regulator. Accepts 4–36V input — covers the full 2S LiPo range (6.6–8.4V). Feeds the Pico W VSYS pin to produce the 3.3V logic rail via the Pico’s internal regulator.
